CSS3 transform 中的Matrix(矩阵)
CSS3 transform 中的Matrix(矩阵)
https://www.zhangxinxu.com/wordpress/2012/06/css3-transform-matrix-%e7%9f%a9%e9%98%b5/
什么是矩阵?
矩阵可以理解为方阵,只不过,平时方阵里面站的是人,矩阵中是数值。
↓
$$
\begin{bmatrix}
1 & 4 & 5\newline
10 & 3 & 6\newline
9 & 10 & 1
\end{bmatrix}
$$
CSS3中的矩阵
CSS3中的矩阵指的是一个方法,书写为matrix()和matrix3d(),前者是元素2D平面的移动变换(transform),后者则是3D变换,2D变换举证为3×3,如上图中的矩阵示意图;3D变换则是4×4的矩阵。
现在,先看一下transform属性:
1 | |
- skew——斜拉
- scale——缩放
- rotate——旋转
- translate——位移
为什么transform: rotate(45deg)会让元素旋转45°呢?这背后运作的机理是什么呢?
下面这张图可以结束上面的疑问:
无论是旋转还是倾斜,本质上都是应用的matrix()方法实现的(修改matrix()方法固定几个值),只是类似于transform:rotate()这种表现形式,我们更容易理解、记忆与上手。
矩阵应用的场景
虽然题目写的是transform中的Matrix,实际上,在CSS3记忆HTML5的世界里,这玩意还是涉猎很广的,比如svg和Canvas。
transform与坐标系统
用过transform旋转的人可以发现了,其默认是绕着中心点旋转的,而这个中心点就是transform-origin属性对应的点,也是所有矩阵计算的一个重要的依据点:
当我们通过transform-origin属性进行设置的时候,矩阵相关计算也随之发生改变,反应到实际图形效果上就是,旋转倾斜的中心点变了。
举例来说,如果我们设置:
1 | |
则,中心店就是左下角的位置。于是动画(例如图片收缩)就是基于图片的左下角这一点:
再举个例子,我们如果这样设置:
1 | |
则,中心点位置有中间移动到了举例左侧50像素,顶部70像素的地方(如下图),而此时的(30,30)的坐标为白点所示的位置(这个位置后面会用到)。
重点(平移)
CSS3transform的matrix()方法写法如下:
1 | |
实际上,这6个参数,对应的举证就是:
$$\begin{bmatrix}
1 & 4 & 5\newline
10 & 3 & 6\newline
9 & 10 & 1
\end{bmatrix}$$
$$\begin{bmatrix}
a & c & e\newline
b & d & f\newline
0 & 0 & 1
\end{bmatrix}$$
注意书写方向是竖着的,
上面提过,矩阵可以想象成古代的士兵方阵,要让其发生变化,只有与另外一个士兵火拼就可以了,即使这是个小阵。
反应在这里就是如下转换公式:
$\begin{bmatrix}
a & c & e\newline
b & d & f\newline
0 & 0 & 1
\end{bmatrix} \bullet
\begin{bmatrix}
x \newline
y \newline
1
\end{bmatrix} =
\begin{bmatrix}
ax + cy + e \newline
bx + dy + f \newline
0 + 0 + 1
\end{bmatrix}$
其中,x,y标识转换元素的所有坐标(变量),后面就是大学时候线性代数的知识:
很简单,3×3矩阵每一行的第一个值与后面1×3的第一个值相乘,第二个值与第二个相乘,第三个与第三个相乘,然后相加,如下面同色标注
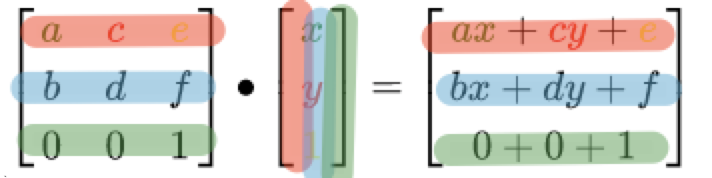
那么ax+cy+e表示什么意思呢?
答:ax+cy+e为变换后的水平坐标,bx+dy+f为变换后的垂直坐标。
下面举例说明,加深举证参数如下:
1 | |
现在我们根据这个矩阵偏移元素的中心点,假设为(0,0)点,即:x=0,y=0。
于是,变换后x坐标就是ax + cy + e = 1×0 + 0×0 + 30,y坐标就是bx + dy + f = 0×0 + 1×0 + 30 = 30。
于是,中心点坐标(0,0)变成了(30,30)。对照上面有个(30,30)的白点图,好好想象下,原来(0,0)的位置,移动到了白点的(30,30)处,同理:(10,10)点变成(40,40),(11,11)点变成了(41,41),(x,y)变成了(x + 30, y + 30) ,由此可以了解到,该语句的作用就是向右移动30像素,向下移动30像素。
实际上transform: matrix(1, 0, 0, 1, 30 , 30)就等同于transform: translate(30px, 30px)注意:translate``rotate等方法都是需要单位的,而matrix方法e, f参数单位可以省略。
总结:
1 | |
缩放,旋转与倾斜
偏移是matrix效果中最简单的,最容易理解的,下面看一下矩阵的缩放,旋转以及倾斜效果。
缩放
上面的示例:
1 | |
我们看到,最后那两个值是控制平移的,元素是没有缩放的( `1: 1`),其中参数中有两个`1`,事实上,这两个就是控制缩放的,由上面的公式可以得到,第一个`1`是控制缩放`x`轴的,第二个`1`是控制`y`轴的。
假设原始点为(x,y)缩放比例为s,则有matrix(s, 0, 0, s, 0, 0)于是套用公式有:
$y^{‘} = bx + dy + f = 0 \times x + s \times y + 0 = {\color{Red} {s \times y}}$
也就是说matrix(s, 0, 0, s, 0, 0)就等同与scale(s, s)。
1 | |
旋转
旋转相比前面两个更要高级些,要用到三角函数。
方法以及参数使用如下:假设角度为θ:
1 | |
结合矩阵公式,就有:
$y^{‘} = x \times \sin \theta + y \times \cos \theta + 0 = x \times \sin \theta + y \times \cos \theta = x \sin \theta + y \cos \theta$
1 | |

倾斜
倾斜也用到了三角函数,不过是tanθ,而且,至于b,c两个参数相关,书写如下(注意y轴倾斜角度在前):
1 | |
结合矩阵公式,就有:
$y^{‘} = x \times \tan {(\theta y)} + y + 0 = x \times \tan {(\theta y)} + y = x \tan {(\theta y)} + y$
1 | |
其他效果
既然有简单的skew,rotate等方法,那么matrix有何用?
答:因为他可以实现一些其他的效果,比如“镜像对称”
1 | |
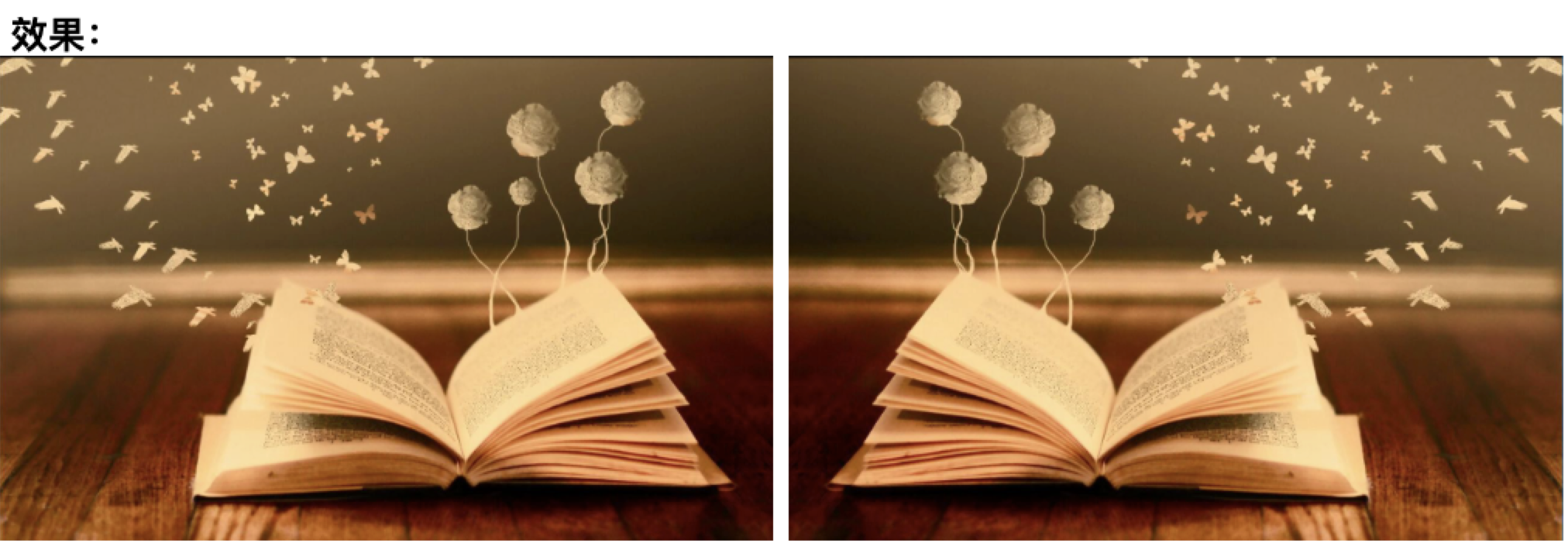
实际上,在镜像对称的时候轴是看不见的。
轴围绕的那个点就是CSS3中transform变换的中心点,自然,镜像对称也不例外。因为该轴永远经过原点,因此,任意对称轴都可以用y = k * x表示。则matrix表示就是:
1 | |
这个如何得到的呢?啊,高中数学来了,就当再高考一次吧,如下图,已经y=kx,并且知道点(x, y)坐标,求其对称点(x’, y’)的坐标?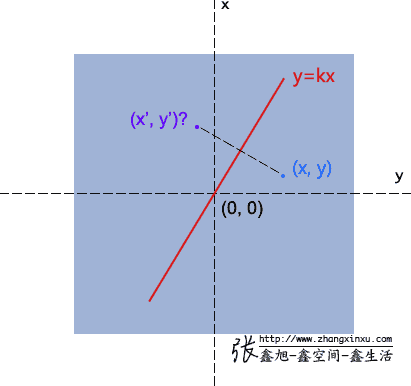
很简单,一是垂直,二是中心点在轴线上,因此有:
$(y-y’) / (x - x’) = -1/ k → ky-ky’ = -x+x’$
$(x + x’) / 2 * k = (y + y’)/2 → kx+kx’ = y+y’$
很简单的,把x'和y'提出来,就有:
$x’ = (1-kk)/(kk+1) x + 2k/(kk+1) y$
$y’ = 2k/(kk+1) x + (kk-1)/(kk+1) y$
在结合矩阵公式:
$x’ = ax+cy+e$
$y’ = bx+dy+f$
我们就可以得到:
$a = (1-kk)/(kk+1);$
$b = 2k/(kk+1);$
$c = 2k/(kk+1);$
$d = (kk-1)/(kk+1);$
3D变换中的矩阵
https://www.zhangxinxu.com/wordpress/2012/09/css3-3d-transform-perspective-animate-transition/
3D变换虽然只比2D多了一个D,但是复杂程度不只多了一个。从二维到三维,是从4到9;而在矩阵里头是从33变成44, 9到16了。
其实,本质上很多东西都与2D一致的,只是复杂度不一样而已。这里就举一个简单的3D缩放变换的例子。
对于3D缩放效果,其矩阵如下:
$\begin{bmatrix}
sx & 0 & 0 & 0\newline
0 & sy & 0 & 0\newline
0 & 0 & sz & 0\newline
0 & 0 & 0 & 1
\end{bmatrix}$
代码表示就是:
1 | |